Парализованная пациентка смогла сама себя напоить

Алексей Паевский
Когда в заголовках мы читаем «ученые научили человека управлять чем-то силой мысли», речь, вероятнее всего, идет именно о нейроинтерфейсах. Чаще всего речь идет о вживленных в мозг электродах, которые напрямую считывают электрическую активность нейронов.
Каждому движению нашей руки или ноги, просто мысли о перемещении в пространстве соответствует определенный паттерн активности. Интерфейс ее считывает и строит библиотеку паттернов, после чего «обученный» компьютер может сам управлять искусственной рукой, ногой, своим аватаром в виртуальной среде…
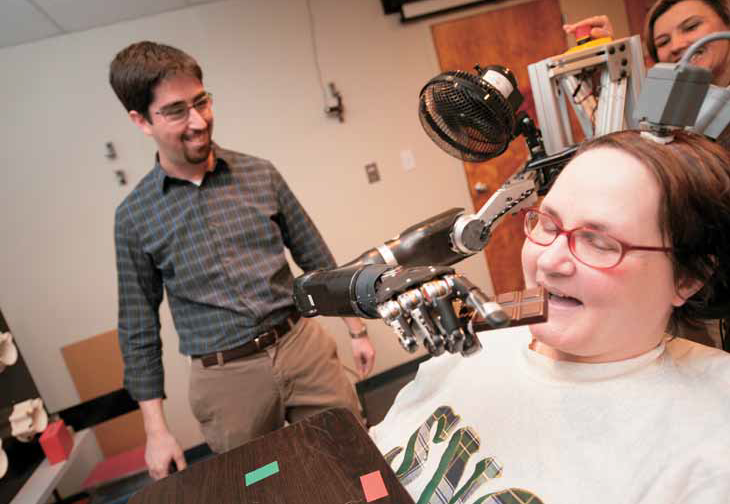
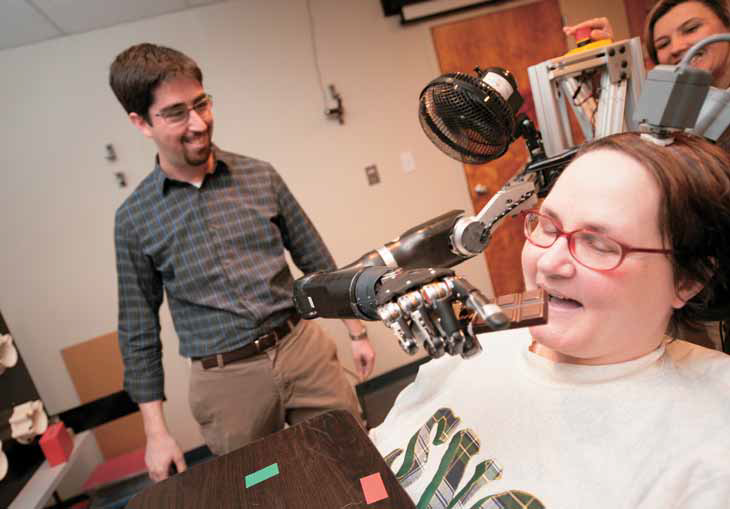
Прорыв в нейроинтерфейсах наметился с 2012 года, когда полностью парализованная пациентка с вживленными 96 электродами на «чипе» размером 5×5 миллиметра сумела натренировать интерфейс «мозг-компьютер» так, что при помощи управляемой им роботической руки смогла сама себя напоить.
Изъян: сигнал идет в одну сторону
С тех пор развитие этой области прикладной нейрофизиологии идет семимильными шагами. Среди главных достижений 2016 года – научение искусственной руки шевелить отдельными пальцами силой мысли (это, правда, очень сложная задача), обучение двух макак управлять силой мысли роботическими тележками…
Но у всех этих достижений есть один изъян: сигнал идет в одну сторону. Вы можете взять стакан с чаем, но не почувствуете, горячий он или холодный. Закрыв глаза, вы не сможете понять, где находится ваша рука (это чувство называется проприоцепцией). Поэтому активно ведутся работы и по обратной связи.
Уже были успехи в экспериментах на людях – электрические сигналы от датчиков на протезе шли либо в остатки периферических нервов, либо напрямую в соматосенсорную кору мозга. Уже понемногу учатся отличать шершавое от гладкого, горячее от холодного, твердое от мягкого.
В будущем технология позволит ощущать прикосновения к протезу
Новый шаг на этом пути сделали швейцарские нейроинженеры. Исследователи использовали неинвазивную технологию двухфотонной микроскопии для считывания активности сотен нейронов с клеточным разрешением. Авторы хотели проверить, смогут ли мыши научиться контролировать нейропротез, используя только искусственную сенсорную обратную связь.
Используя методы нейровизуализации в моторной коре, они узнавали, когда в мозге мыши активировались определенные нейроны, и пропорционально степени их активности стимулировали нейроны в сенсорной коре. За каждую превышающую порог активацию грызун получил вознаграждение. Так, уже после 20 минут обучения он был способен чаще вызывать нужную активность нейронов.
Ученые сделали вывод: искусственное ощущение не только воспринято мозгом, но и успешно интегрировано в качестве обратной связи движения протеза. Видимо, двусторонняя связь вовлекает основополагающие мозговые функции – поэтому обучение прошло так быстро.
Чувствовать положение тела – естественно и, возможно, это ощущение порождается базовыми нейронными цепями. В будущем эта технология позволит ощущать прикосновения к протезу и чувствовать силу сжатия объектов. Будем ждать новых работ.

